Network architecture:
We have generally seen deep neural networks for computer vision, image classification, and object detection tasks. In this project, we have to extend deep neural networks to 3-dimensional for learning spatio-temporal features of the video feed.
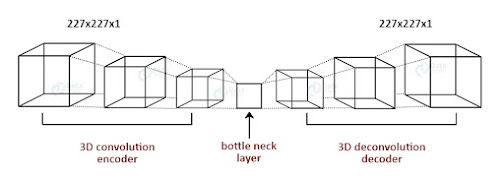
For this video surveillance project, we will introduce a spatio temporal autoencoder, which is based on a 3D convolution network. The encoder part extracts the spatial and temporal information, and then the decoder reconstructs the frames. The abnormal events are identified by computing the reconstruction loss using the Euclidean distance between the original and reconstructed batch.
Intelligent Video Surveillance with Deep Learning
We will use spatial temporal encoders to identify abnormal activities.
The dataset for abnormal event detection in video surveillance:
Following are the comprehensive datasets that are used to train models for anomaly detection tasks.
CUHK Avenue Dataset:
This dataset contains 16 training and 21 testing video clips. The video contains 30652 frames in total.
The training videos contain video with normal situations. The testing videos contain videos with both standard and abnormal events.
Dataset Download Link: Avenue Dataset for Abnormal Event Detection
UCSD pedestrian Dataset:
This dataset contains videos with pedestrians. It includes groups of people walking towards, away, and parallel to the camera. The abnormal event includes:
- Non-pedestrian entities
- Anomalous pedestrian motion patterns
Dataset Download Link: UCSD Anomaly Detection Dataset
Project Source Code
Before proceeding ahead, please download the source code which we used in this deep learning project: Video Surveillance Project Code
Video Surveillance – Anomaly Even Detection Code:
First, download any one of the above datasets and put in a directory named “train”.
Make a new python file train.py and paste the code described in following steps:
1. Imports:
from keras.preprocessing.image import img_to_array,load_img
from keras.layers import Conv3D,ConvLSTM2D,Conv3DTranspose
from keras.models import Sequential
from keras.callbacks import ModelCheckpoint, EarlyStopping
2. Initialize directory path variable and describe a function to process and store video frames:
train_videos=os.listdir('train_path')
train_images_path=train_path+'/frames'
os.makedirs(train_images_path)
def store_inarray(image_path):
image=load_img(image_path)
image=img_to_array(image)
image=cv2.resize(image, (227,227), interpolation = cv2.INTER_AREA)
gray=0.2989*image[:,:,0]+0.5870*image[:,:,1]+0.1140*image[:,:,2]
3. Extract frames from video and call store function:
for video in train_videos:
os.system( 'ffmpeg -i {}/{} -r 1/{} {}/frames/%03d.jpg'.format(train_path,video,fps,train_path))
images=os.listdir(train_images_path)
image_path=train_image_path + '/' + image
store_inarray(image_path)
4. Store the store_image list in a numpy file “training.npy”:
store_image=np.array(store_image)
store_image.resize(b,c,a)
store_image=(store_image-store_image.mean())/(store_image.std())
store_image=np.clip(store_image,0,1)
np.save('training.npy',store_image)
5. Create spatial autoencoder architecture:
stae_model.add(Conv3D(filters=128,kernel_size=(11,11,1),strides=(4,4,1),padding='valid',input_shape=(227,227,10,1),activation='tanh'))
stae_model.add(Conv3D(filters=64,kernel_size=(5,5,1),strides=(2,2,1),padding='valid',activation='tanh'))
stae_model.add(ConvLSTM2D(filters=64,kernel_size=(3,3),strides=1,padding='same',dropout=0.4,recurrent_dropout=0.3,return_sequences=True))
stae_model.add(ConvLSTM2D(filters=32,kernel_size=(3,3),strides=1,padding='same',dropout=0.3,return_sequences=True))
stae_model.add(ConvLSTM2D(filters=64,kernel_size=(3,3),strides=1,return_sequences=True, padding='same',dropout=0.5))
stae_model.add(Conv3DTranspose(filters=128,kernel_size=(5,5,1),strides=(2,2,1),padding='valid',activation='tanh'))
stae_model.add(Conv3DTranspose(filters=1,kernel_size=(11,11,1),strides=(4,4,1),padding='valid',activation='tanh'))
stae_model.compile(optimizer='adam',loss='mean_squared_error',metrics=['accuracy'])
6. Train the autoencoder on the “training.npy” file and save the model with name “saved_model.h5”:
training_data=np.load('training.npy')
frames=training_data.shape[2]
training_data=training_data[:,:,:frames]
training_data=training_data.reshape(-1,227,227,10)
training_data=np.expand_dims(training_data,axis=4)
target_data=training_data.copy()
callback_save = ModelCheckpoint("saved_model.h5", monitor="mean_squared_error", save_best_only=True)
callback_early_stopping = EarlyStopping(monitor='val_loss', patience=3)
stae_model.fit(training_data,target_data, batch_size=batch_size, epochs=epochs, callbacks = [callback_save,callback_early_stopping])
stae_model.save("saved_model.h5")
Run this script to train and save the autoencoder model.
Now make another python file “test.py” and observe the results of abnormal event detection on any custom video.
Paste the below code in “test.py”:
from keras.models import load_model
def mean_squared_loss(x1,x2):
a,b,c,d,e=difference.shape
sq_difference=difference**2
mean_distance=distance/n_samples
model=load_model("saved_model.h5")
cap = cv2.VideoCapture("__path_to_custom_test_video")
image = imutils.resize(frame,width=700,height=600)
frame=cv2.resize(frame, (227,227), interpolation = cv2.INTER_AREA)
gray=0.2989*frame[:,:,0]+0.5870*frame[:,:,1]+0.1140*frame[:,:,2]
gray=(gray-gray.mean())/gray.std()
imagedump=np.array(imagedump)
imagedump.resize(227,227,10)
imagedump=np.expand_dims(imagedump,axis=0)
imagedump=np.expand_dims(imagedump,axis=4)
output=model.predict(imagedump)
loss=mean_squared_loss(imagedump,output)
if cv2.waitKey(10) & 0xFF==ord('q'):
print('Abnormal Event Detected')
cv2.putText(image,"Abnormal Event",(100,80),cv2.FONT_HERSHEY_SIMPLEX,2,(0,0,255),4)
cv2.imshow("video",image)
Now, run this script and observe the results of video surveillance, it will highlight the abnormal events.









No comments
If you have any doubts, Please let me know